Mạch điều khiển động cơ MKE-M10 I2C motor control module

Giới thiệu
Mạch điều khiển động cơ MKL-M10 I2C motor control module được sử dụng để điều khiển cùng lúc 2 động cơ DC và 2 động cơ RC Servo trong các ứng dụng điều khiển robot, xe tự hành, mạch sử dụng giao tiếp I2C nên dễ dàng kết nối và sử dụng với chỉ 2 chân giao tiếp I2C là SDA (data) và SCL (clock).
Mạch điều khiển động cơ MKL-M10 I2C motor control module được thiết kế để có thể sử dụng trực tiếp an toàn với các board mạch giao tiếp ở mức điện áp 3.3/5VDC: Arduino, Raspberry Pi, Jetson Nano, Micro:bit,....
| Cảnh báo: Xin nạp (upload) chương trình trước khi kết nối cảm biến vào mạch Arduino để chắc chắn rằng các chân giao tiếp với cảm biến đã được cấu hình đúng! |
Thông số kỹ thuật
- Điện áp hoạt động: 5VDC
- Chuẩn giao tiếp: Digital I2C
- Điện áp giao tiếp: TTL 3.3/5VDC
- Tương thích với các board mạch giao tiếp ở mức điện áp 3.3/5VDC: Arduino, Raspberry Pi, Jetson Nano, Micro:bit,....
- Điện áp cấp cho động cơ VM: 5~12VDC
- Dòng tối đa cho mỗi động cơ DC: 1.2A
- Điều khiển được 2 động cơ DC và 2 động cơ RC Servo cùng lúc.
Kích thước

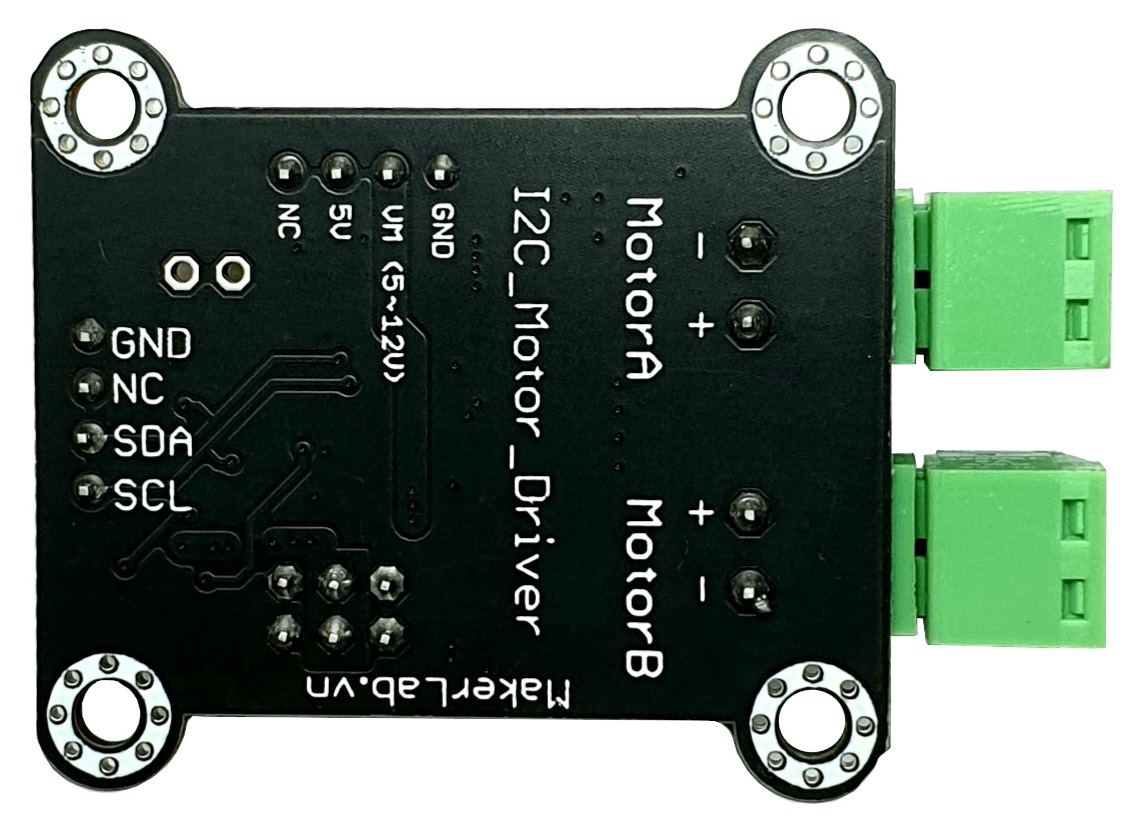
Các chân tín hiệu
{kind=link}
{kind=link}
| MKL-M10 | Ghi chú |
|---|---|
| GND | Chân cấp nguồn âm 0VDC |
| 5V | Chân cấp nguồn dương 5VDC |
| SDA | Chân tín hiệu Digital Data |
| SCL | Chân tín hiệu Digital Clock |
Kết nối phần cứng
Bước 1: Chuẩn bị phần cứng:
- 1 x Mạch Vietduino Uno (Arduino Uno Compatible)
- 1 x Mạch MakerEDU Shield
- 1 x Mạch điều khiển động cơ MKL-M10 I2C motor control module
Bước 2: Cắm MakerEdu Shield vào mạch Vietduino Uno.
Bước 3: Kết nối cảm biến vào Port (I2C) của MakerEDU Shield.
Bước 4: Kết nối Vietduino Uno với máy tính thông qua cáp USB.
{kind=link}
| Lưu ý: Nếu không có sẵn MakerEDU Shield, bạn có thể kết nối trực tiếp cảm biến với Arduino/Vietduino như bảng dưới đây. |
| Arduino/Vietduino | Mạch điều khiển động cơ MKL-M10 I2C motor control module |
|---|---|
| GND | GND |
| 5V | 5V |
| A4 | SDA |
| A5 | SCL |